
Blogs, Bevel Gear, Worm Gear
Worm Gear vs Bevel Gear: Choosing a Right Angle Drive

Mar
Introduction
Right-angle drives show up everywhere—from compact positioning mechanisms to heavy-duty power transfer. Designers often narrow the options to two classic solutions: worm gear sets and bevel gear sets. Both can turn motion by 90°, yet they behave very differently in efficiency, heat, noise, and backdrivability.
At Wenlio Gear, we see these differences surface in RFQs and troubleshooting: a system needs a high ratio in one stage, a drive must hold position without a brake, or an assembly must run cooler at speed. This guide compares worm and bevel solutions in practical terms, then finishes with a short supplier/RFQ checklist you can reuse.
The core difference in one sentence
Worm sets excel at high single-stage ratio and can resist backdriving in some conditions, while bevel sets usually deliver higher efficiency and better high-speed stability.

Why the choice matters in real machines
Heat and lubrication can become the real constraint
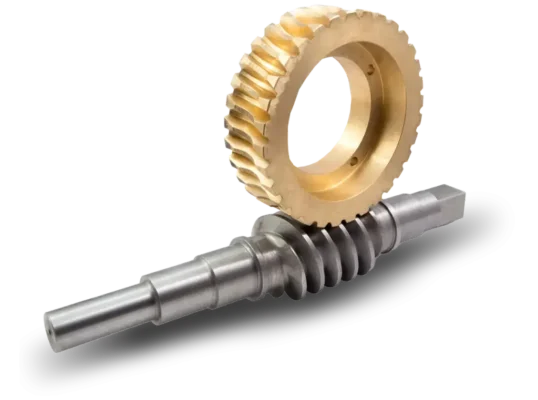
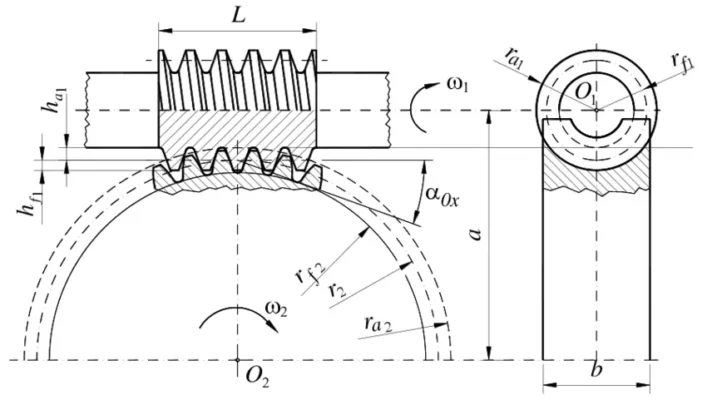
Worm sets transmit power largely through sliding contact, so losses often show up as heat. That makes lubricant choice, oil film stability, and housing heat dissipation more critical—especially in continuous duty or higher input speed.
Your “must-have” requirement often decides the answer quickly
If you must hold load without backdrive or you need a large ratio in one stage, worm sets often fit the job. If you prioritize energy efficiency, temperature control, or high-speed behavior, bevel sets usually become the safer default.
Early alignment prevents late-stage redesign
A short input list—target ratio, duty cycle, backdrive expectation, lubrication method, and noise/temperature priorities—often prevents the “it works on paper but runs hot/noisy” problem once the gearbox is assembled.
The common right-angle options you’ll see
| Option | Best when you need… | Watch-outs |
| Worm gear set | High ratio in one stage; compact reducer; possible anti-backdrive behavior | Lower efficiency/heat; sensitive to lubrication and duty cycle |
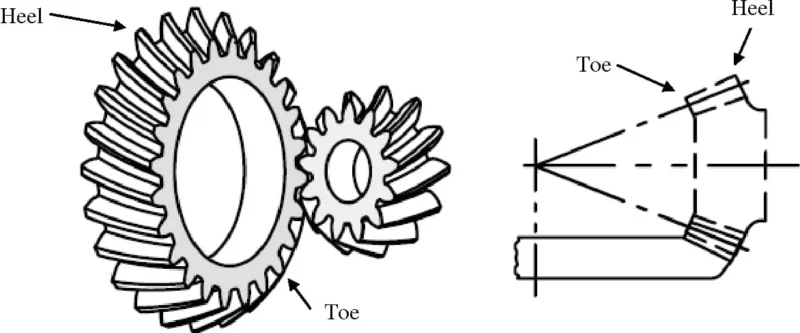
| Bevel gear set (straight/spiral) | Efficient 90° power transfer; stable performance at speed | Lower single-stage ratio; straight bevel can be noisier than spiral |
| Hypoid bevel set (offset) | Packaging flexibility (offset shafts) with smooth meshing | More sliding than spiral bevel; lubrication and setup still matter |
Most projects start with “we need a 90° direction change,” but the next question should be: do you need high ratio or high efficiency? That one decision usually narrows the architecture faster than any catalog comparison.



Where each solution is commonly used
- Compact reducers and conveyors where high reduction and compact packaging matter
- Positioning mechanisms that need holding or reduced backdrive tendency (verify in real conditions)
- Industrial right-angle transmissions where efficiency and temperature rise are critical
- Drivetrain right-angle stages where repeatability and NVH matter (often spiral bevel or hypoid architectures)
- Automation and robotics modules where size, smoothness, and control response drive selection
- Rebuild programs replacing worn right-angle gearsets and trying to stabilize noise or heat performance
In practice, worm designs often appear in compact reducers and lifting/positioning applications, while bevel designs dominate where power density, efficiency, and high-speed stability matter most.
The comparison that usually decides it
| Topic | Worm gear set | Bevel gear set |
| Shaft layout | Usually 90° with non-intersecting axes | Usually 90° with intersecting axes (hypoid adds offset) |
| Ratio per stage | Often higher in one stage | Usually modest per stage |
| Efficiency & heat | More loss → more heat management | Typically higher efficiency; easier thermal behavior |
| Backdriving | Can resist backdrive depending on geometry + lubrication | Generally backdrivable |
| Noise & smoothness | Often smooth at moderate speed | Spiral bevel smoother; straight bevel can be noisier |
| Lubrication sensitivity | High (oil film and additives matter) | Important, but often less extreme than worm |
A key engineering difference sits behind this table: worm meshes rely on significant sliding, which raises frictional heat and places a premium on oil quality (viscosity choice, EP performance, and film stability). By contrast, bevel meshes usually run with more rolling contact, so they often deliver better efficiency and a wider safe operating window at speed.
Materials also differ in many worm designs: manufacturers commonly pair a hardened steel worm with a more compliant worm wheel material to manage sliding wear and reduce seizure risk. For bevel gear sets, tooth geometry control (profile and lead), runout, and contact stability often dominate performance—especially when NVH targets are strict.
Benefits, matched to design goals
| Your goal | Better match | Why |
| High ratio in one stage | Worm | Reduces need for extra stages and keeps the drive compact |
| Resist backdriving / hold load | Worm (verify in real conditions) | May reduce or eliminate external brake needs in some designs |
| Cooler, more efficient operation | Bevel | Less sliding loss in many cases |
| High-speed stability and NVH control | Bevel (spiral/hypoid) | Smoother meshing and better high-speed behavior |
Tip: treat “self-locking” as a system outcome, not a guarantee. Oil choice, temperature, and wear can change backdriving behavior over time. Similarly, the quietest option depends on tooth form, housing stiffness, and assembly alignment—not just the gear type.
Supplier selection tips
- Start with ratio + backdrive expectation: share the target ratio and whether the output must hold load without backdrive.
- Share duty cycle and thermal limits: provide speed/torque range, runtime pattern, ambient temperature, and any housing temperature limits.
- Describe lubrication reality: state lubrication method (splash/forced), oil type/viscosity range, and contamination risk.
- Align on acceptance checks: for bevel—profile/lead/pitch/runout and a contact-pattern approach; for worm—contact behavior, surface condition, and any backdrive test condition.
- Confirm material and surface durability targets: ask how the supplier balances wear resistance with core toughness and how they verify consistency.
Good RFQs make trade-offs explicit. If you only request “90° drive,” suppliers may optimize for cost. If you state heat limits, noise targets, and backdrive needs, they can optimize for performance and repeatability.
Why Choose Us
Wenlio Gear supports precision right-angle transmission components with an emphasis on clear geometry definition and repeatable inspection evidence.
For bevel gear projects, we align design intent with real assembly datums and apply inspection workflows that track tooth profile, lead, pitch-related consistency, and runout stability—so results remain comparable from prototype to batch production.
When evaluating worm versus bevel solutions, we focus on the decision inputs that truly drive field performance: target ratio, duty cycle, thermal limits, lubrication method, and backdrive expectations. This helps teams select a gearset that matches the application constraints and reduces iteration caused by mismatched assumptions.

FAQ
Q1: Which is more efficient, worm or bevel?
A: Bevel sets usually run more efficiently; worm sets often lose more energy to sliding friction and generate more heat.
Q2: Are worm gears always self-locking?
A: No. Backdriving depends on lead angle, friction, lubrication, temperature, and load—validate it in your real conditions.
Q3: Which handles higher speed better?
A: Bevel gearing—especially spiral bevel—often performs better at higher speed and higher duty cycles.
Q4: Which is better for very high ratio in one stage?
A: Worm gearing often delivers higher single-stage ratios; bevel usually needs more stages for high ratios.
Q5: What should I send for an RFQ?
A: Target ratio, torque/speed range, duty cycle, space constraints, lubrication method/viscosity, noise limits, and required inspection evidence.
Conclusion
Worm and bevel gear sets both solve right-angle transmission, but they optimize for different outcomes. Worm gearing often fits when you need a large single-stage reduction or reduced backdriving, while bevel gearing often fits when you need higher efficiency, cooler operation, and stable high-speed performance.
The fastest selection path is to define ratio, duty cycle, backdrive expectation, and lubrication reality first, then confirm acceptance checks. If you are choosing a right-angle drive or replacing an existing gear set, you are welcome to Contact Us with your drawings and operating conditions so we can recommend a practical, production-ready solution.
Good read. A lot of selection mistakes happen because people only focus on the 90-degree layout. In practice, efficiency, backdriving, and assembly accuracy usually make the real difference between worm and bevel solutions.