
Blogs, Bevel Gear, Spur Gear, Helical Gear, Worm Gear, Planetary Gear
Pinion Gear Types: 7 Common Pinion Gears Explained

Feb
Introduction
Pinion gear types can look similar on a drawing, but they behave very differently in real machines. In most gear pairs, a pinion is the gear with fewer teeth and a smaller outside diameter. A common exception is the miter gear set, where two gears are typically specified as a matched 1:1 pair. This guide explains seven common pinion gear categories, where each fits best, and what to share for a fast, accurate RFQ.
Types of pinion gears
Below are seven common categories often grouped under “pinion gears” in engineering and sourcing conversations:
Spur pinion gear(Spur gear)
What it is: Straight-tooth, parallel-shaft external gear; tooth lines are parallel to the axis.
Typical strengths: Simple structure and straightforward meshing; often used with a larger spur gear or a rack.
Typical trade-offs: Can be noisier at higher speed due to more abrupt engagement; commonly preferred for medium/low speed and lighter loads.

Helical pinion gear
What it is: Helical-tooth gear with a defined helix angle; gradual engagement improves smoothness.
Typical strengths: Often smoother and quieter running; higher contact ratio can support higher load than spur in many cases.
Typical trade-offs: Generates axial force, so the system may need thrust support; typically higher setup demands and cost than spur.

Bevel pinion gear(Bevel gear)
What it is: Conical gear used for power transfer between intersecting shafts (often 90°).
Typical strengths: Changes drive direction; spiral bevel and hypoid forms can engage more gradually with lower impact.
Typical trade-offs: More complex manufacturing; some bevel forms can introduce axial force and increase sensitivity to setup and lubrication.

Miter gear set (miter pinion)
What it is: A special bevel case commonly specified as a matched 1:1 pair for intersecting shafts (often 90°).
Typical strengths: Compact right-angle drive with a fixed 1:1 ratio—direction change without speed change.
Typical trade-offs: May be less forgiving in high-load/high-speed cases if alignment, backlash, and lubrication are not controlled; curved-tooth versions raise processing cost.

Herringbone pinion gear(Herringbone gear)
What it is: Left-right symmetric helical lines that help offset axial forces during meshing.
Typical strengths: High contact ratio and smooth engagement; improved load distribution and lower noise in higher-duty compact drives.
Typical trade-offs: High processing difficulty and cost; usually used where the benefits justify the complexity.

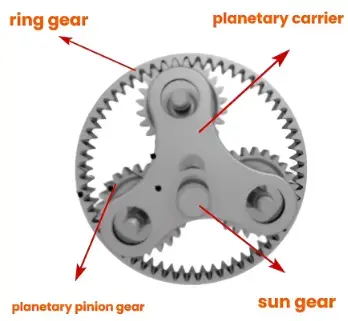
Planetary pinion gear (planet gear)
What it is: A key component in a planetary gear train, working with a sun gear and ring gear; multiple planets share load.
Typical strengths: Compact packaging and high torque density potential; stable running when precision and assembly keep load sharing balanced.
Typical trade-offs: Higher manufacturing and maintenance complexity; performance depends on related components and careful assembly.
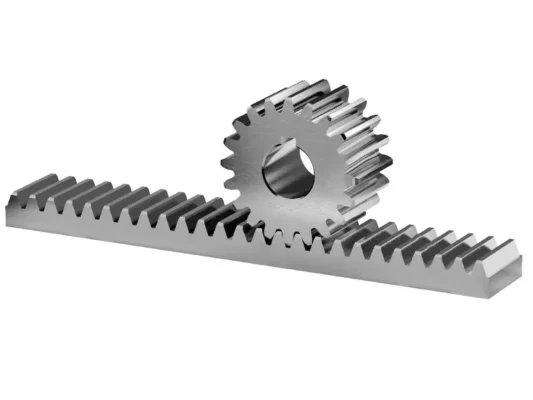
Rack and pinion gear
What it is: The pinion that meshes with a rack to convert rotary motion to linear motion (and back).
Typical strengths: Direct rotary-to-linear conversion for steering, actuators, and positioning systems.
Typical trade-offs: Selection depends heavily on stiffness, backlash targets, lubrication method, and contamination environment.
Common users and applications
- Spur pinion – general parallel-shaft drives; basic speed/torque conversion; rack drives at moderate speed
- Helical pinion – smoother, quieter parallel-shaft drives for medium and higher speeds
- Bevel pinion – intersecting-shaft drives for direction change (commonly 90°)
- Miter set – compact right-angle 1:1 direction change in tight space
- Herringbone – higher-duty compact stages needing better load sharing and axial-force balancing
- Planetary pinion – compact reducers and torque-dense gear stages with multiple planet gears
- Rack and pinion – rotary-to-linear conversion in steering, actuators, and positioning mechanisms
Key features that affect performance
| Feature | Why it matters | Most related types |
| Shaft layout | Parallel vs intersecting shafts vs rotary-linear conversion | Spur/Helical; Bevel/Miter; Rack and pinion |
| Smoothness and noise | Gradual engagement reduces impact and vibration | Helical; Bevel (spiral/hypoid); Herringbone; Planetary |
| Axial force | May require thrust support and changes bearing design | Helical; Bevel (spiral/hypoid); Herringbone offsets axial |
| Load sharing | More teeth/meshes sharing load improves durability | Herringbone; Planetary (multiple planets) |
| Manufacturability and cost | Specialized geometry increases cost and lead time | Bevel/Miter/Herringbone/Planetary often higher complexity |
| Service and maintenance | More parts and tighter stack-up can raise service effort | Planetary systems |
Benefits by design goal
| Goal | What usually helps | Types to consider |
| Lower complexity and cost | Simple geometry and direct meshing | Spur pinion |
| Quieter and smoother running | Gradual engagement, higher contact ratio | Helical; Bevel (spiral); Herringbone |
| Right-angle direction change | Intersecting-shaft geometry | Bevel; Miter set |
| Compact high ratio stage | Multi-gear load sharing in tight space | Planetary train (planet pinions) |
| Axial force control | Symmetry or dedicated thrust support | Herringbone; Helical with thrust bearings |
| Rotary to linear conversion | Rack and pinion pairing | Rack and pinion |
How to choose a supplier
- Start with layout: parallel shafts, intersecting shafts, or rotary-to-linear—this narrows the gear family fast.
- Define operating conditions: speed range, torque range, duty cycle, shock loads, temperature, and lubrication method.
- Call out axial-load expectations: helical and some bevel forms can introduce axial force, so thrust support may be needed.
- Align on acceptance checks: backlash, runout, tooth accuracy targets, and assembly datums—especially for bevel/miter and planetary builds.
- For planetary designs, confirm the full set scope (sun/planet/ring/carrier interfaces) and any balancing requirements for load sharing.
Why Choose Us
Wenlio Gear supports precision pinion gear projects across spur, helical, bevel and miter sets, herringbone designs, planetary gear components, and rack and pinion pinions. We help teams match gear type to layout, load, noise goals, and production repeatability.
FAQ
Q: Does “pinion” always mean the smaller gear?
A: In most gear pairs, yes. A common exception is a miter set, which is typically specified as a matched 1:1 pair.
Q: Why do helical pinions often run smoother than spur pinions?
A: Helical teeth engage more gradually and usually have a higher contact ratio, which can reduce noise and vibration.
Q: Why do some pinions require thrust bearings or extra support?
A: Helical and some bevel forms can generate axial force during meshing, so the system may need thrust support to offset it.
Q: When is a miter set a better fit than a bevel pair?
A: When you need a compact right-angle stage with a fixed 1:1 ratio for intersecting shafts (commonly 90°).
Q: Why are planetary pinions described as compact but demanding?
A: Planetary systems can be torque-dense and compact, but they depend on precision across multiple parts and careful assembly.
Conclusion
Pinion gears are not one-size-fits-all. Spur and helical pinions fit many parallel-shaft drives, bevel and miter sets solve right-angle layouts, herringbone supports higher-duty compact stages with axial-force balancing, planetary pinions enable torque-dense compact reducers, and rack and pinion converts rotary motion to linear travel. For the fastest RFQ outcome, share layout, speed/torque/duty cycle, noise expectations, lubrication assumptions, and acceptance checks.
If you are specifying a pinion or replacing an existing design, you are welcome to Contact Us with your drawing (or key dimensions) and operating conditions so we can align on a practical route quickly.